外部紧急停止
图1-1为IRC5紧凑控制柜的正面示意图。
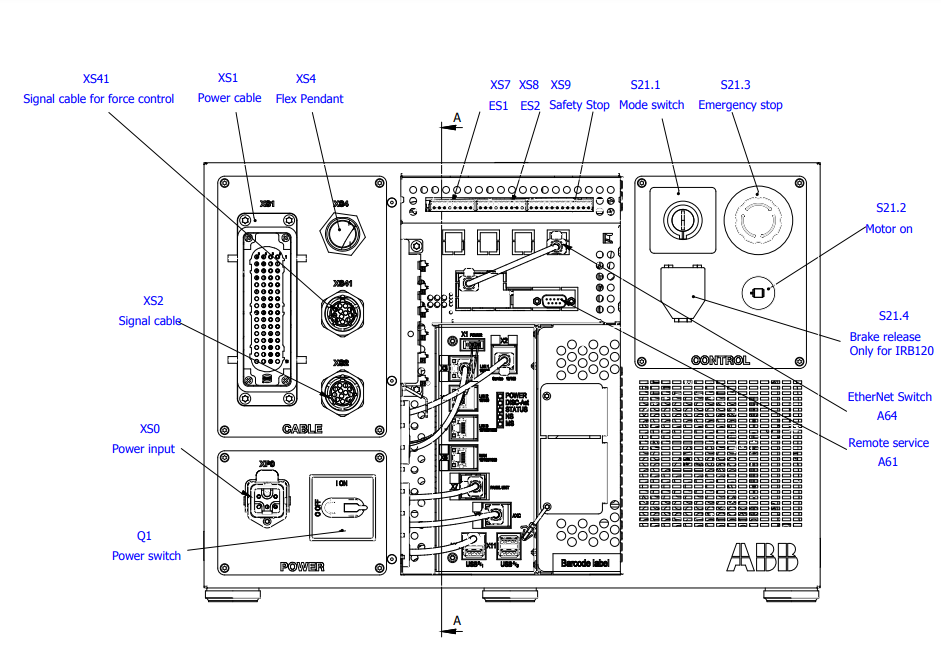
图1-2为IRC5紧凑控制柜内安全板中紧急停止回路示意图。安全板预留给外部紧急停止的接线端为XS7和XS8(紧急停止为双回路,XS7对应信号ES1,XS8对应信号ES2)。
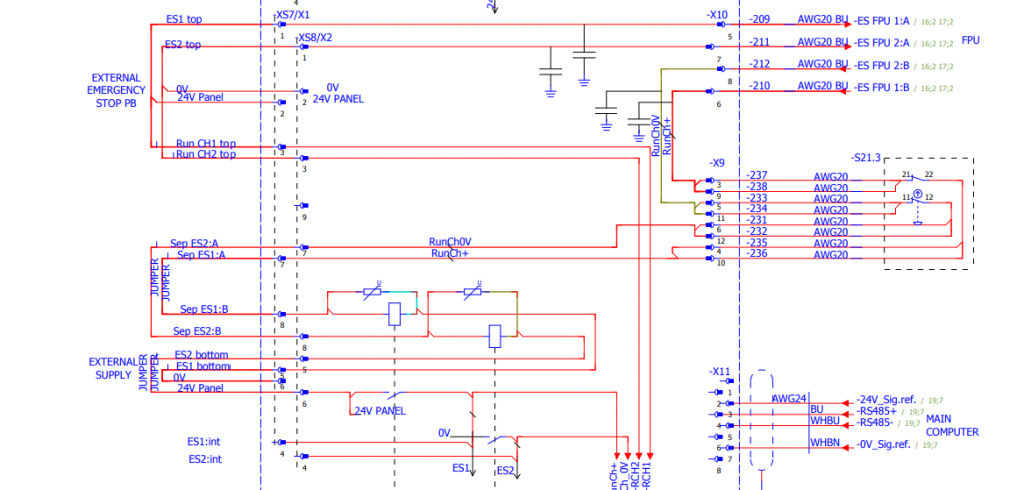
机器人出厂时,为满足图1-2的回路要求,XS7部分的1、2、3引脚短接,7、8引脚短接,5、6引脚短接(XS8回路相同)。此时紧急停止回路通路。
若外部紧急停止按钮为无源,则可移除XS7中的引脚7和引脚8短接片(其余短接片保留),将紧急停止按钮回路1接入XS7端中的引脚7和引脚8;移除XS8中的引脚7和引脚8短接片(其余短接片保留),将紧急停止按钮回路2接入XS8端中的引脚7和引脚8。
若外部紧急停止按钮为有源,还需要考虑外部电源的接入。由图1-2 可知,可以断开原本XS7端中的引脚1和引脚2短接片(引脚2为安全板自带的24V),把外部电源24V接入XS7端的引脚1。同理,断开原本的XS7的引脚5和引脚6短接片(引脚6为安全板自带的0V),把外部电源0V接入XS7端的引脚5。切记,保持XS7的引脚2和引脚3通路(此为内部运行链信号,不要断开)。针对XS8端,同理。
外部自动停止
根据图1-3所示的 Auto Stop部分, Auto Stop接线端位于XS9端。由图1-3可知,机器人出厂默认配置1、2、3引脚短接,4、5、6引脚短接,7、8、9引脚短接,10、11、12引脚短接,保证回路通路。
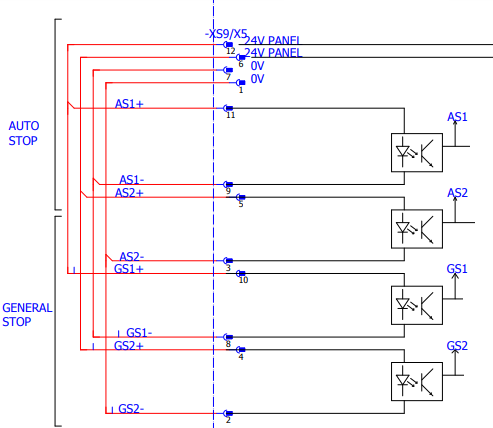
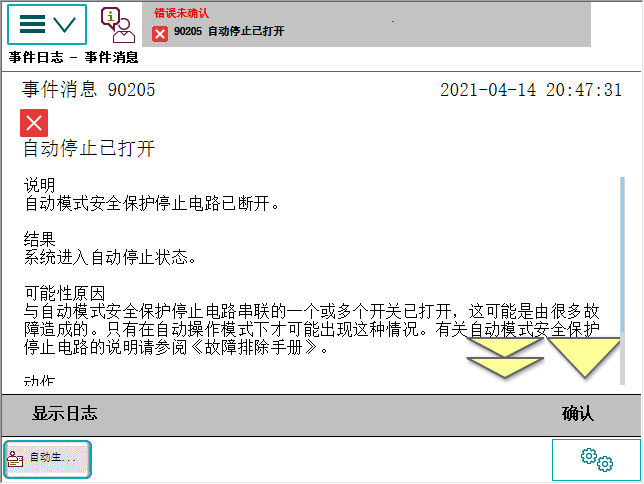
若现场使用安全门(双回路)在机器人处于自动状态时开门触发停止,则可以断开安全板XS9端的引脚11和引脚12的短接片(保证引脚10和引脚12依旧连接,不影响GS1),将安全门回路1接入XS9端的引脚11和引脚12。可以断开XS9端的引脚5和引脚6短接片。(保证引脚4和引脚6依旧连接,不影响GS2),将安全门回路1接入XS9端的引脚5和引脚6。此时若机器人处于自动模式且安全门打开,则安全板AS1和AS2指示灯熄灭,示教器会有如图1-4所示的提示,自动停止已打开。
外部常规停止
根据图1-3所示的General Stop部分,General Stop接线端处于安全板的X5端。由图1-3可知,机器人出厂默认配置1、2、3引脚短接,4、5、6引脚短接,7、8、9引脚短接,10、11、12引脚短接,保证回路通路。
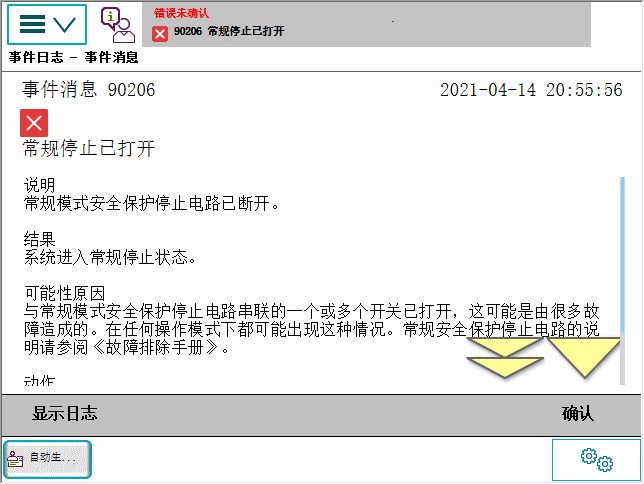
若现场使用安全门(双回路)在机器人处于手动或者自动状态时开门触发停止,则可以断开XS9端的引脚10和引脚12的短接片(保证引脚11和引脚12依旧连接,不影响AS1),将安全门回路1接入XS9端的引脚10和引脚12。可以断开引脚4和引脚6的短接片(保证引脚5和引脚6依旧连接,不影响AS2),将安全门回路2接入XS9端的引脚4和引脚6.此时若安全门被打开,GS1和 GS2回路指示灯熄灭,示教器会有如图1-5所示的提示。
上文所展示的电气原理图,如需PDF请点击这里!

文章评论